罗拉牵伸之引导力、控制力、牵伸力和握持力
牵伸区内任意一根浮游纤维都被周围的快速纤维和慢速纤维所包围。快速纤维作用于浮游纤维上的摩擦力fa称为引导力。慢速纤维作用于浮游纤维上的力fv称为控制力。控制力使浮游纤维保持慢速,而引导力则使浮游纤维快速前进。一根浮游纤维在牵伸区内所处不同位置时,作用于其上的引导力和控制力也不相同。当引导力大于控制力时,就能使浮游纤维变速。
如图5-3-9所示,牵伸区内任意一根长度为lf的浮游纤维,其头端位于x1位置时,尾端位于(x1-lf)的位置,它被周围的快速纤维l1和慢速纤维l0所包围。

图5-3-9 引导力与控制力
由于牵伸区内纵向摩擦力界强度分布为FM(x),在任一截面x上,浮游纤维lf的微小片段dx受到周围纤维的摩擦力总和为FM(x)dx;由于牵伸区内快慢纤维的数量分布,慢速纤维对浮游纤维lf的接触机率为K(x)/[k(x)+K(x)],快速纤维对它的接触机率为k(x)/[k(x)+K(x)]。则快速纤维对浮游纤维的引导力为:
fa =  (5-3-11)
(5-3-11)
慢速纤维对浮游纤维的控制力为
fv=![]() (5-3-12)
(5-3-12)
显然,当fa>fv时,该纤维改为快速运动;当fa<fv时,该纤维仍保持原来慢速运动。
影响引导力和控制力的主要因素有:接触的快、慢速纤维的数量;摩擦力界的强度分布;浮游纤维本身的长度和处在须条中的
为了使牵伸过程中浮游纤维运动保持稳定,必须使引导力和控制力稳定。
六.牵伸力和握持力
牵伸区中,前钳口所握持的须条是由快速纤维组成,后钳口所握持的须条是由慢速纤维所组成。罗拉钳口必须具有足够的握持力来克服所有快速纤维和慢速纤维间的摩擦力,牵伸作用才能顺利进行。
(一)牵伸力和握持力
1.牵伸力
牵伸过程中,以前罗拉速度运动的快速纤维从周围的慢速纤维中抽出时,所受到的摩
擦阻力的总和,称为牵伸力。
牵伸力与控制力、引导力是有区别的,牵伸力是指须条在牵伸过程中受到的摩擦阻力,而控制力和引导力是对一根纤维而言的。牵伸力与快、慢速纤维的数量分布及工艺参数有关。
由于任意一根纤维受到周围的慢速纤维的摩擦阻力称为控制力,故牵伸力T可以从控制力的概念由公式(5-3-12)导出:
T=![]() (5-3-13)
(5-3-13)
式中lm:纤维最大长度。
S:前后钳口间的距离。
2.握持力
在罗拉牵伸中,为了能使牵伸顺利进行,罗拉钳口对须条要有足够的握持力,以克服须条牵伸时的牵伸力。
所谓罗拉握持力是指罗拉钳口对须条的摩擦力。其大小取决于钳口对须条的压力及上下罗拉与须条间摩擦系数。如果罗拉握持力不足以克服须条上的牵伸力时,须条就不能正确地按罗拉表面速度运动,而在罗拉钳口下打滑,造成牵伸效率低,输出须条不匀,甚至出现“硬头”等不良后果。
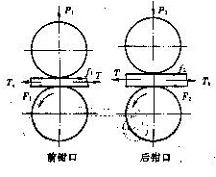
图5-3-10须条在两对简单罗拉构成的牵伸钳口下的受力分析。
在前钳口,前罗拉作用于须条的摩擦力F1与须条的运动方向相同,皮辊对须条的摩擦力f1与须条的运动方向相反,而牵伸力T是快速纤维受到慢速纤维的摩擦力的总和,故T与须条的运动方向相反。因而正常牵伸时,为了防止须条在钳口下打滑,前钳口握持须条的条件是:
F1-f1≥T
后钳口握持的须条,在牵伸力T的作用下,有向前滑动的趋势,故T与须条的运动方向相同,而后罗拉作用于须条的摩擦力F2及后皮辊作用于须条的摩擦力f2都与须条的运动方向相反。因而,正常牵伸时,后钳口握持须条的条件是:
F2+f2≥T (5-3-15)
由以上分析可知,前后钳口的实际握持力分别为(F1-f1)及(F2+f2)。因此欲使前后钳口同样达到与牵伸力相适应的握持力,则F1>F2,故前皮辊上的压力P1应大于后皮辊上的压力P2。
 相关信息
相关信息 






 推荐企业 推荐企业
推荐企业 推荐企业 推荐企业
推荐企业


 您所在的位置:
您所在的位置:


